Przemysław Walczyk, leitender technischer Leiter
Industriegreifer verstehen
Industrielle Greifer sind darauf ausgelegt, Aufgaben zu automatisieren, die traditionell von menschlichen Händen ausgeführt werden. Diese Hände sind hochentwickelte Werkzeuge, die sich über Millionen von Jahren der Evolution herausgebildet haben. Die menschliche Hand besitzt fünf Finger, 27 Freiheitsgrade und ermöglicht sowohl Kraft- als auch Tastgefühl. Sie ist anpassungsfähig und unglaublich präzise. Die aktuelle Technologie erlaubt es jedoch noch nicht, solch hochentwickelte Greifer zu einem vernünftigen Preis und bei gleichzeitig hoher Zuverlässigkeit herzustellen.
Um diese Lücke zu schließen, suchen Ingenieure nach Vereinfachungen, die die Kernfunktionen erhalten und gleichzeitig sicherstellen, dass diese Innovationen das Unternehmen nicht in den Ruin treiben. Diese Funktionen können je nach Anwendung variieren. Im Fall der Behälterkommissionierung umfassen die wichtigsten Funktionen Folgendes:
- Erkennung, wann ein Gegenstand berührt wird
- Einen Gegenstand erfolgreich greifen
- Bestätigung, dass ein Artikel aufbewahrt wird
- Einen Gegenstand effektiv freigeben
Verschiedene Greifertypen erreichen diese Funktionalitäten auf unterschiedliche Weise. Beispielsweise nutzt ein Saugnapfgreifer Druckrückmeldung, um festzustellen, ob er ein Objekt hält, während ein fingerbasierter Greifer eher Positionsrückmeldung verwendet. Obwohl die Implementierung variiert, bleibt das zugrunde liegende Signal dasselbe.
Vier wichtige Erkenntnisse für die Entwicklung von Greifern für die Behälterkommissionierung
Ungeachtet der Greiftechnologie oder des Herstellungsverfahrens können diese vier Grundprinzipien die Entwicklung effektiver Greifer für Behälterentnahmeanwendungen leiten.
1. Unnötige Komplexität vermeiden
Der Versuch, einen einzigen Greifer zu entwickeln, der alles handhaben kann, was eine menschliche Hand kann, führt wahrscheinlich zu einem kostspieligen, komplexen System mit vielen potenziellen Fehlerquellen. Wenn eine Anwendung die Handhabung einer Vielzahl von Gegenständen erfordert, ist der Einsatz eines Werkzeugwechslers mit mehreren einfachen, aber spezialisierten Werkzeugen praktischer. Dieser Ansatz erhöht die Zuverlässigkeit und senkt die Gesamtkosten.
2. Standardisierung über alle Anwendungsfälle hinweg
Jede neue Greiferkonstruktion verursacht Entwicklungskosten. Greifer sollten daher möglichst wiederverwendbar sein, um den Einsatz in ähnlichen Anwendungen zu erleichtern. Modifikationen wie die Anpassung der Länge, der Austausch der Saugnäpfe oder Greiferfinger oder die Anpassung des Greifers an verschiedene Roboterarme sollten einfach und kostengünstig sein. Diese Standardisierung minimiert den Entwicklungsaufwand und maximiert gleichzeitig die Flexibilität.
3. Iterativ zur Exzellenz gelangen
Anstatt jedes Mal einen perfekten Greifer zu entwickeln, sollte die Entwicklung als iterativer Prozess betrachtet werden. Beginnen Sie mit einem einfachen Design und verfeinern Sie es in mehreren Versionen. Während einfache Greifer innerhalb von zwei oder drei Iterationen nahezu perfekt sein können, benötigen komplexere Designs unter Umständen zehn oder mehr Verfeinerungen. Kontinuierliche Verbesserung führt langfristig zu optimaler Leistung.
4. Auf Abnutzung vorbereiten
Der Greifer ist das am stärksten beanspruchte Bauteil eines Robotersystems. Er kommt in jedem Zyklus kontrolliert mit Objekten in Kontakt und verschleißt oder bricht mit der Zeit. Eine Konstruktion, die den Greifer für den einfachen Austausch durch das Personal vor Ort geeignet macht, und die Bevorratung von Ersatzteilen können Ausfallzeiten deutlich reduzieren. Mit sorgfältiger Planung lässt sich ein potenzieller Ausfall, der Tage dauern könnte, auf wenige Tage verkürzen.
Ein Beispiel aus dem wirklichen Leben
Zeitweise hatten wir zwei Arten von Robotern – einen für Mode und einen für allgemeine Waren.
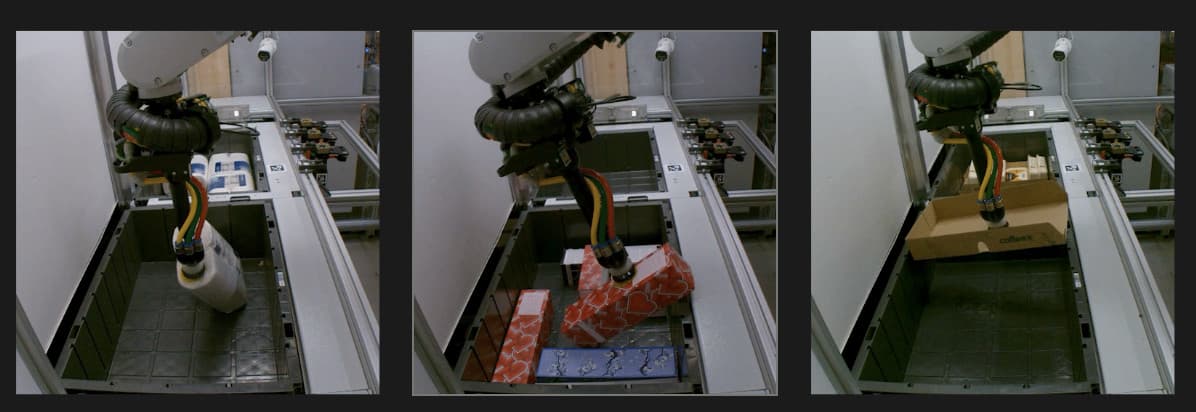
Die erste Lösung nutzte einen einzelnen Saugnapf, der mit einem breiten pneumatischen Schlauch verbunden war, um den Luftdurchsatz zu maximieren – besonders wichtig beim Aufnehmen von Polybeuteln. Die zweite Lösung verwendete mehrere Werkzeuge an einem Werkzeugwechsler mit drei unabhängigen pneumatischen Kanälen, was zwar eine hohe Flexibilität ermöglichte, aber einen geringeren Luftdurchsatz pro Saugnapf zur Folge hatte. Um das volle Potenzial auszuschöpfen, entschieden wir uns, diese beiden Anwendungsfälle zu vereinen.
Möglich wurde dies durch ein einfaches, aber leistungsstarkes Werkzeug namens Triflow. Es vereint alle drei pneumatischen Kanäle in einem einzigen, der mit einem Saugnapf verbunden ist. Dadurch wird der Luftstrom maximiert, sodass wir Polybeutel in loser Folie aufnehmen können. Gleichzeitig lässt sich das Werkzeug nahtlos in den Werkzeugwechsler integrieren. Mit Triflow konnten wir zwei spezialisierte Roboter zu einem einzigen vereinen.
Diese Strategie führte zu einer beeindruckenden Erfolgsquote beim ersten Pick. 97% bei Arvato (Mode) Und 99% bei Komplett (Allgemeinwaren).
Das Gesamtbild
Ein außergewöhnlicher Greifer ist für die präzise Objektmanipulation unerlässlich, kann aber allein nicht effektiv funktionieren. Er benötigt ein fortschrittliches Bildverarbeitungssystem, einen robusten Steuerungsmechanismus und einen zuverlässigen Roboterarm. Menschen betrachten ihre Augen, ihr Gehirn, ihre Arme und Hände oft als selbstverständlich, doch in der Robotik muss jede Komponente sorgfältig entworfen, entwickelt und integriert werden, um die perfekte Lösung zu schaffen.
Bei Nomagic haben wir uns genau darauf spezialisiert – wir vereinen Vision, Intelligenz und Automatisierung, um nahtlose und effiziente Roboterlösungen zu entwickeln.
Hier erfahren Sie mehr über die Roboter von Nomagic.