Przemysław Walczyk, director superior de ingeniería
Comprensión de las pinzas industriales
Las pinzas industriales están diseñadas para automatizar tareas que tradicionalmente realizan las manos humanas, herramientas altamente sofisticadas moldeadas por millones de años de evolución. Una mano humana tiene cinco dedos, veintisiete grados de libertad y proporciona retroalimentación tanto de fuerza como de tacto. Es adaptable e increíblemente precisa. Sin embargo, la tecnología actual aún no permite la creación de pinzas tan sofisticadas a un costo razonable y con alta fiabilidad.
Para superar esta brecha, los ingenieros buscan simplificaciones que preserven las funcionalidades esenciales, garantizando al mismo tiempo que estas innovaciones no lleven a la quiebra a la empresa. Estas funcionalidades pueden variar según la aplicación. En el caso de la selección de contenedores, las capacidades clave incluyen:
- Detectar cuándo se toca un objeto.
- Agarrar con éxito un objeto
- Confirmar que un artículo está en custodia
- Lanzar un artículo de manera efectiva
Los distintos tipos de pinzas logran estas funcionalidades de maneras diferentes. Por ejemplo, una pinza de ventosa puede basarse en la retroalimentación de presión para determinar si está sujetando un objeto, mientras que una pinza basada en dedos probablemente utilice la retroalimentación de posición. Si bien la implementación varía, la señal subyacente permanece igual.
Cuatro lecciones clave para el desarrollo de pinzas para la recogida de residuos en contenedores
Independientemente de la tecnología de agarre o del proceso de fabricación, estos cuatro principios fundamentales pueden guiar el desarrollo de pinzas eficaces para aplicaciones de recogida de objetos en contenedores.
1. Evitar la complejidad innecesaria
Intentar diseñar una sola pinza capaz de manipular todo lo que una mano humana puede, probablemente resultará en un sistema costoso y complejo con múltiples puntos de fallo. Si una aplicación requiere manipular una amplia variedad de objetos, es más práctico utilizar un cambiador de herramientas con varias herramientas sencillas pero especializadas. Este enfoque mejora la fiabilidad y reduce los costes generales.
2. Estandarizar en todos los casos de uso
Cada nuevo diseño de pinza conlleva un coste de ingeniería. Siempre que sea posible, las pinzas deben diseñarse pensando en su reutilización para facilitar su uso en aplicaciones similares. Las modificaciones, como ajustar la longitud, cambiar el tipo de ventosas o dedos, o adaptar la pinza a diferentes brazos robóticos, deben ser sencillas y económicas. Esta estandarización minimiza los costes de diseño y maximiza la flexibilidad.
3. Iterar hacia la excelencia
En lugar de intentar crear una pinza perfecta en cada ocasión, conciba el desarrollo como un proceso iterativo. Comience con un diseño sencillo y refine su funcionamiento a lo largo de varias versiones. Si bien las pinzas simples pueden alcanzar la casi perfección en dos o tres iteraciones, los diseños más complejos pueden requerir diez o más refinamientos. La mejora continua conduce a un rendimiento óptimo con el tiempo.
4. Prepárese para el desgaste.
La pinza es la parte más expuesta físicamente de un sistema robótico. Entra en contacto controlado con los objetos en cada ciclo y, con el tiempo, se desgasta o se rompe. Diseñar la pinza para que el personal pueda reemplazarla fácilmente y mantener unidades de repuesto en stock puede reducir significativamente el tiempo de inactividad. Con una planificación adecuada, una posible interrupción que podría durar días se puede reducir a tan solo unos días.
Un ejemplo de la vida real
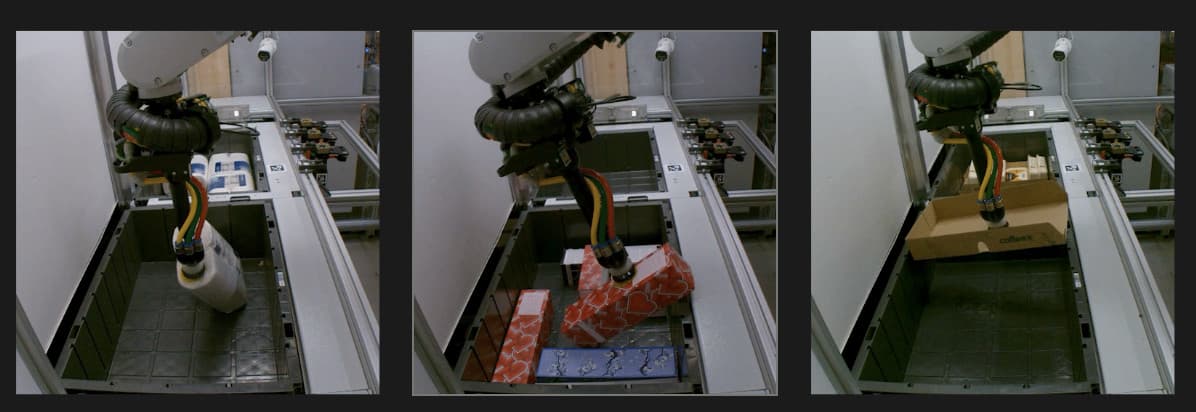
En un momento dado, teníamos dos tipos de robots: uno dedicado a la moda y otro a la mercancía en general.
El primer sistema utilizaba una sola ventosa conectada a un tubo neumático ancho, maximizando el flujo de aire, algo fundamental para recoger bolsas de polietileno. El segundo sistema empleaba varias herramientas en un cambiador con tres canales neumáticos independientes para una mayor versatilidad, pero a costa de un menor flujo de aire por ventosa. Para aprovechar todo su potencial, decidimos combinar ambos casos de uso.
Esto fue posible gracias a una herramienta sencilla pero potente que llamamos Triflow. Combina los tres canales neumáticos en uno solo, conectado a una ventosa. Esto maximiza el flujo de aire, lo que nos permite recoger bolsas de polietileno envueltas en papel de aluminio suelto, a la vez que facilita la integración perfecta de esta herramienta con el cambiador de herramientas. Con Triflow pudimos unificar dos robots especializados en uno solo.
Esta alineación arrojó una impresionante tasa de éxito en la primera selección. 97% en Arvato (moda) y 99% en Completo (mercancía en general).
El panorama general
Una pinza excepcional es fundamental para dominar la manipulación de objetos, pero no puede funcionar eficazmente por sí sola. Debe complementarse con un sistema de visión avanzado, un mecanismo de control robusto y un manipulador robótico fiable. Los humanos solemos dar por sentados nuestros ojos, cerebro, brazos y manos, pero en robótica, cada componente debe diseñarse, desarrollarse e integrarse para crear la solución perfecta.
En Nomagic, nos especializamos precisamente en esto: combinar visión, inteligencia y automatización para desarrollar soluciones robóticas fluidas y eficientes.
Obtén más información sobre los robots de Nomagic aquí.