Przemysław Walczyk, starszy kierownik ds. inżynierii
Zrozumienie chwytaków przemysłowych
Chwytaki przemysłowe zostały zaprojektowane do automatyzacji zadań tradycyjnie wykonywanych przez ludzkie ręce, które są wysoce zaawansowanymi narzędziami ukształtowanymi przez miliony lat ewolucji. Ludzka dłoń ma pięć palców, dwadzieścia siedem stopni swobody i zapewnia zarówno siłę, jak i sprzężenie zwrotne dotykowe. Jest elastyczna i niezwykle precyzyjna. Jednak obecna technologia nie pozwala jeszcze na stworzenie tak zaawansowanych chwytaków w rozsądnej cenie, zachowując jednocześnie wysoką niezawodność.
Aby załatać tę lukę, inżynierowie poszukują uproszczeń, które zachowują podstawowe funkcjonalności, a jednocześnie gwarantują, że innowacje te nie doprowadzą firmy do bankructwa. Funkcjonalności te mogą się różnić w zależności od zastosowania. W przypadku kompletacji pojemników, kluczowe możliwości obejmują:
- Wykrywanie dotknięcia przedmiotu
- Udane uchwycenie przedmiotu
- Potwierdzenie, że przedmiot jest przechowywany
- Skuteczne uwolnienie przedmiotu
Różne typy chwytaków realizują te funkcjonalności na różne sposoby. Na przykład chwytak przyssawkowy może opierać się na sprzężeniu zwrotnym od nacisku, aby określić, czy trzyma przedmiot, podczas gdy chwytak palcowy częściej wykorzystuje sprzężenie zwrotne od położenia. Chociaż implementacja jest różna, sygnał bazowy pozostaje ten sam.
Cztery kluczowe wnioski dotyczące rozwoju chwytaków do podnoszenia pojemników
Bez względu na technologię chwytania lub proces produkcyjny, te cztery podstawowe zasady mogą stanowić wskazówkę przy opracowywaniu skutecznych chwytaków do zastosowań związanych z pobieraniem przedmiotów z pojemników.
1. Unikaj niepotrzebnej złożoności
Próba zaprojektowania pojedynczego chwytaka, zdolnego obsłużyć wszystko, co może obsłużyć ludzka ręka, prawdopodobnie doprowadzi do powstania kosztownego, skomplikowanego systemu z wieloma punktami awarii. Jeśli aplikacja wymaga obsługi szerokiej gamy przedmiotów, bardziej praktyczne jest użycie zmieniacza narzędzi z kilkoma prostymi, ale specjalistycznymi narzędziami. Takie podejście zwiększa niezawodność i obniża koszty ogólne.
2. Standaryzacja w różnych przypadkach użycia
Każdy nowy projekt chwytaka wiąże się z kosztami inżynieryjnymi. W miarę możliwości chwytaki powinny być projektowane z myślą o możliwości ponownego użycia, aby ułatwić wdrożenie w podobnych zastosowaniach. Modyfikacje, takie jak regulacja długości, zmiana rodzaju przyssawek lub palców, czy dostosowanie chwytaka do różnych ramion robota, powinny być proste i niedrogie. Taka standaryzacja minimalizuje nakłady pracy przy projektowaniu, jednocześnie maksymalizując elastyczność.
3. Iteruj do doskonałości
Zamiast próbować za każdym razem stworzyć idealny chwytak, traktuj rozwój jako proces iteracyjny. Zacznij od prostego projektu i udoskonalaj go w kolejnych wersjach. O ile proste chwytaki mogą osiągnąć niemal doskonałość w ciągu dwóch lub trzech iteracji, o tyle bardziej złożone projekty mogą wymagać dziesięciu lub więcej udoskonaleń. Ciągłe doskonalenie prowadzi do optymalnej wydajności w dłuższej perspektywie.
4. Przygotuj się na zużycie i uszkodzenia
Chwytak jest najbardziej narażonym na uszkodzenia fizyczne elementem systemu robotycznego. W każdym cyklu ma on kontrolowany kontakt z obiektami i w końcu ulega zużyciu lub uszkodzeniu. Zaprojektowanie chwytaka tak, aby można go było łatwo wymienić na miejscu, oraz stałe utrzymywanie zapasowych egzemplarzy może znacznie skrócić przestoje. Dzięki odpowiedniemu planowaniu, potencjalny przestój, który może trwać nawet kilka dni, można skrócić do zaledwie kilku.
Przykład z życia wzięty
W pewnym momencie mieliśmy dwa rodzaje robotów – jeden przeznaczony do branży modowej, a drugi do handlu artykułami codziennego użytku.
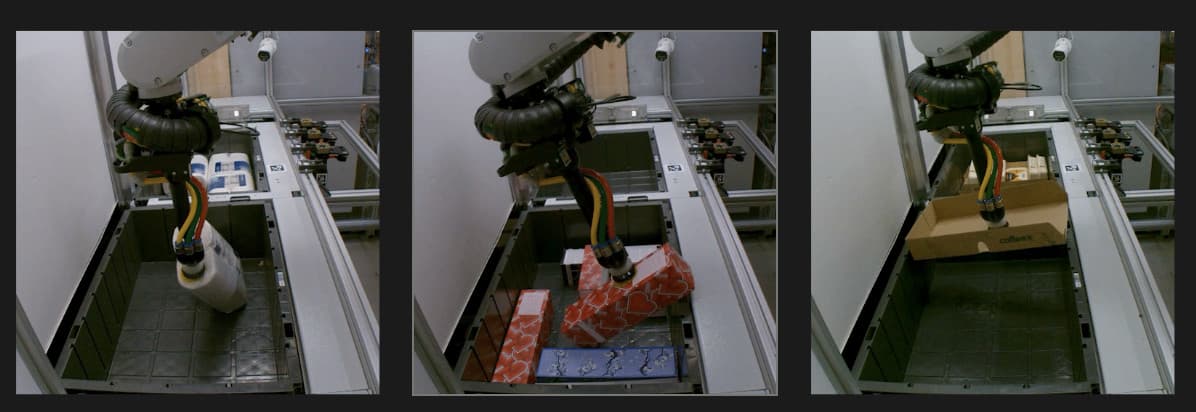
Pierwszy z nich wykorzystywał pojedynczą przyssawkę podłączoną do szerokiej rury pneumatycznej, maksymalizując przepływ powietrza – co jest bardzo ważne podczas kompletowania worków foliowych. Drugi wykorzystywał wiele narzędzi na zmieniaczu narzędzi z trzema niezależnymi kanałami pneumatycznymi, co zapewniało dużą wszechstronność, ale kosztem niższego przepływu powietrza na przyssawkę. Aby w pełni wykorzystać potencjał, postanowiliśmy połączyć te dwa przypadki użycia.
Było to możliwe dzięki prostemu, ale potężnemu narzędziu, które nazywamy Triflow. Łączy ono wszystkie trzy kanały pneumatyczne w jeden, podłączony do jednej przyssawki. Maksymalizuje to przepływ powietrza, umożliwiając nam pobieranie worków foliowych w luźnych opakowaniach, a jednocześnie umożliwiając bezproblemową integrację tego narzędzia z zmieniaczem narzędzi. Dzięki Triflow udało nam się połączyć dwa wyspecjalizowane roboty w jeden.
To ustawienie zapewniło imponujący wskaźnik sukcesu pierwszego wyboru 97% w Arvato (moda) I 99% w Komplett (artykuły powszechnego użytku).
Szerszy obraz
Wyjątkowy chwytak jest kluczowy dla opanowania manipulacji obiektami, ale nie może działać efektywnie w izolacji. Musi być wspierany przez zaawansowany system wizyjny, solidny mechanizm sterowania i niezawodny manipulator robota. Ludzie często traktują swoje oczy, mózgi, ramiona i dłonie jako coś oczywistego, ale w robotyce każdy element musi zostać zaprojektowany, opracowany i zintegrowany, aby stworzyć idealne rozwiązanie.
W Nomagic specjalizujemy się właśnie w tym – łączymy wizję, inteligencję i automatyzację, aby tworzyć płynne, wydajne rozwiązania robotyczne.
Dowiedz się więcej o robotach Nomagic tutaj