Tricks and tips of using the RealSense D400 series
By Mikołaj Zalewski Machine Learning Engineer & Przemysław Walczyk, Senior Engineering Manager
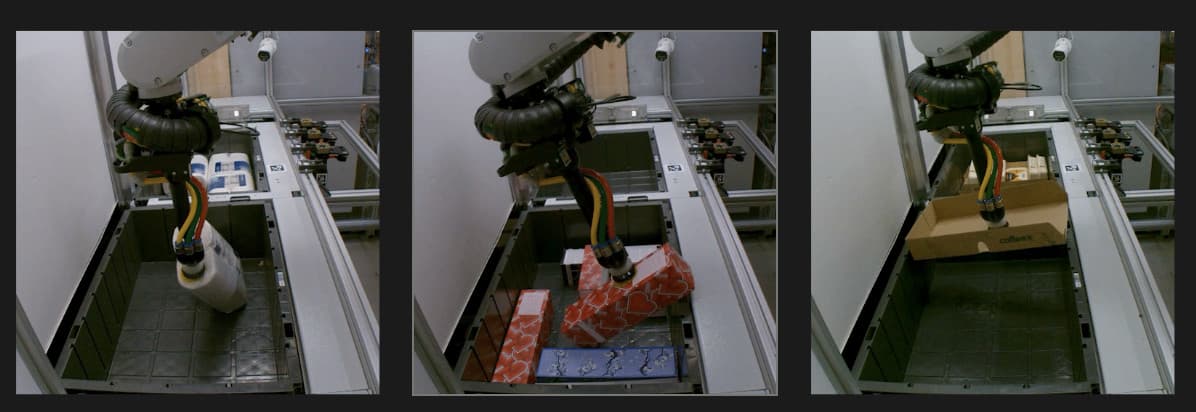
At Nomagic, we work extensively with RealSense D400 series cameras (primarily the D415). These cameras are popular due to their ability to provide RGB and depth input at a reasonable cost — tens of times cheaper than industrial depth cameras. As a stereo vision camera with a static pattern, the D415 allows multiple cameras to operate simultaneously without interference. While the depth quality could ideally be better (on the other hand, the RealSense computes depth in real-time at high frame rates), the main issue we encountered was the cameras intermittently refusing to work. These problems were often exacerbated by the complexity of our vision system, which involves multiple cameras connected to the system at once. Here, we share some effective ways to address these issues.
Problems and Basic Workaround — Re-plugging the Cameras
Often, after the ROS node process for the camera terminated, the camera would fail to run the next time we attempted to use it. Occasionally, the camera would also stop working during execution. In such cases, we encountered error messages related to I/O or protocol errors, or the camera would simply disappear from rs-enumerate-devices and lsusb. Replugging the camera usually resolved the issue (though in one instance we had to reboot the computer, as described below). We used powered hubs, and replugging the cable between the camera and the hub was always a reliable fix. Replugging the cable between the hub and the PC, however, only worked in some cases. This suggests there are at least two different types of problems at play — see the next section for more details.
In one experiment, we connected four cameras to a system and restarted their ROS nodes 6,631 times consecutively. We observed 45 cases where one of the four cameras failed to reappear (approximately 1%). Details of this issue can be found in this bug report, though results can vary significantly — on some days the cameras performed much better, while on others they performed worse.
More Refined Workarounds
Since unplugging cameras remotely isn’t feasible, we employ two additional tricks:
Reset the USB Controllers This can be done using a script, effectively simulating unplugging the cable between the PC and a powered hub. However, this method only works in some cases.
Power Cycle the Computer Using a wake alarm, we can power down the computer and have it turn back on automatically. This script ensures the system shuts down fully before restarting, as incomplete shutdowns prevent it from coming back online.
While these workarounds help in the short term, they are not suitable for production environments. Therefore, we sought more robust solutions.
Upgrade the Firmware
The default 5.8.15 firmware that ships with the cameras tends to cause problems with intermittent failures. Upgrading to the 5.9.x series resolves many of these issues, with the 5.10.x series offering even greater stability.
Ensure a USB3 Connection
Occasionally, a camera will connect in USB2 mode (even when plugged into a USB3 port), resulting in significantly reduced functionality. For example, capturing both depth and infrared images or achieving higher resolutions and frame rates becomes impossible. To verify the connection type, run lsusb -t. Each camera should appear as four entries with a speed of 5000M. If you see only three entries at 480M, replugging the camera is necessary.
Manage Bandwidth Limitations
As detailed in this document, RealSense cameras consume a significant portion of the USB3 theoretical bandwidth of 5000Mbps (with real bandwidth typically around 3200–3600Mbps). Connecting too many cameras to a single USB port via hubs can cause failures due to bandwidth limitations. Even with separate USB ports, many motherboards have only one or two internal USB hubs, meaning ports may share the same 5000Mbps bandwidth. The lsusb -t command can reveal how many hubs are in use (look for lines marked 5000M).
To increase bandwidth:
Purchase a PCIe card with additional USB ports. High-quality cards provide separate bandwidth for each port, whereas cheaper ones share bandwidth across ports.
Reduce the cameras’ frame rate or resolution to lower bandwidth consumption.
Reset the Camera Regularly
Resetting the camera before use proved highly effective, particularly with older firmware versions. Many issues were resolved by programmatically resetting the camera, as demonstrated in this commit. Adding such code to the camera startup process greatly reduced cases of failure to initialise.
Beware of /dev/media* Device Leakage Bug
Resetting or unplugging cameras can expose a bug in some Linux kernels, including the version used in Ubuntu 16.04 LTS. As described in this report, certain kernel versions leak /dev/media* devices upon disconnection. Once all 255 devices are used, RealSense cameras stop functioning.
Symptoms include:
lsusb -t showing Driver= instead of Driver=uvcvideo.
Kernel logs containing “media: could not get a free minor”.
ls /dev/media* showing 255 entries.
The only workaround is a system reboot, though upgrading to a kernel version unaffected by this bug (e.g., 4.18 or later) is preferable.
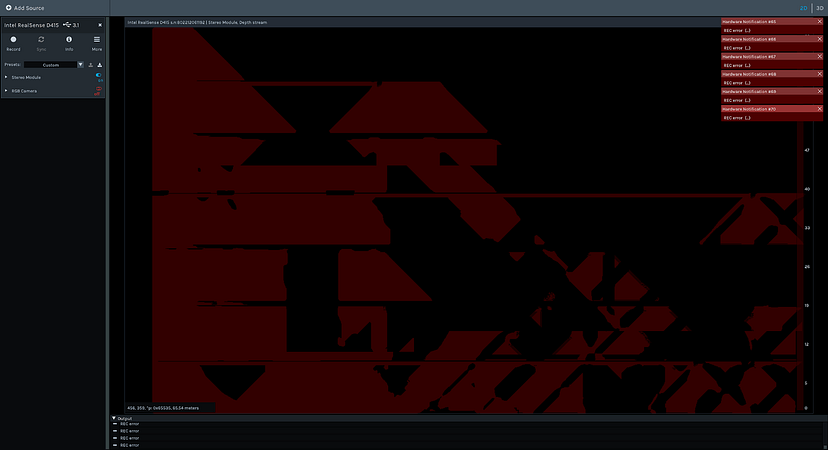
Depth Calibration Data Corruption
If your depth stream starts appearing distorted, it may indicate corrupted depth calibration data. The “Dynamic Calibration Tool” can restore calibration data using Intel.Realsense.CustomRW -g, followed by running the calibration procedure.
Inspect Your Cables
Some problems stem from faulty cables, particularly when the camera is mounted on a moving robotic arm. Symptoms include a specific camera failing more frequently over time until it ceases functioning entirely. Replacing the cable usually resolves this. While we don’t yet have a reliable method for detecting failing cables, counting incomplete frames or using the GetPortErrorCount command (introduced in USB 3.1) could help.
Note: USB3’s theoretical bandwidth of 5000Mbps can interfere with 2.5GHz radio equipment. For example, we had a wireless keyboard stop working when plugged in near a RealSense camera. Shielded USB cables or avoiding such devices nearby may mitigate this issue.
Intel Support is Helpful
Many of the tricks described here were discovered through interactions with Intel RealSense Support, for which we are grateful. You can open tickets there and expect a prompt response.
By Michał Grzejdziak-Zdziarski, Senior Machine Learning Manager; Markus Wulfmeier, Chief Scientist Making sure every order that ships to a customer is correct sounds like a solved problem until you look…
By Markus Wulfmeier, Chief Scientist In our pursuit of general-purpose physical AI, our field keeps looking to the horizon: designing massive simulations, scraping internet video, curating ever-larger teleoperation datasets. Yet…
By Filip Grządkowski, VP Engineering In the race to automate the physical world, not all intelligence is created equal. For years, robotics has been driven by breakthroughs in AI labs:…